Informed (Heuristic) Search
Unit 3: Search Techniques for Problem Solving — Section 3.4
Uninformed algorithms explore blindly, with no sense of direction. When you are navigating to a destination and can see the skyline, you naturally turn toward it. Informed search formalizes that intuition: use problem-specific knowledge to guide the algorithm toward the goal instead of expanding nodes in all directions equally.
- Heuristic Function h(n)
-
A function that estimates the cost of the cheapest path from node n to the nearest goal state. A heuristic is computed from the current state alone — it looks forward without actually expanding nodes. Example: for navigation, h(n) = straight-line distance from n to the destination.
A good heuristic should be:
-
Fast to compute — if computing h takes longer than expanding nodes, it defeats the purpose
-
Informative — the closer h(n) is to the true remaining cost, the better the search performs
-
Never an overestimate — more on this requirement in Section 3.5
Greedy Best-First Search
Greedy best-first search always expands the node that appears closest to the goal, as measured by h(n).
Evaluation function: f(n) = h(n)
Implementation: Priority queue ordered by h(n) (lowest h first).
The algorithm is "greedy" because it makes locally optimal choices — always reaching for what looks nearest — without considering the cost of the path already traveled.
Romania route-finding: Arad to Bucharest
Using straight-line distance to Bucharest as h(n):
-
h(Arad) = 366 km
-
h(Sibiu) = 253 km
-
h(Fagaras) = 176 km
-
h(Rimnicu) = 193 km
-
h(Pitesti) = 100 km
-
h(Bucharest) = 0 km
Greedy expansion sequence: Start at Arad → expand toward Sibiu (h = 253, lowest among neighbors) → expand toward Fagaras (h = 176) → reach Bucharest.
Path found: Arad → Sibiu → Fagaras → Bucharest = 450 km
Optimal path: Arad → Sibiu → Rimnicu → Pitesti → Bucharest = 418 km
Greedy found a solution quickly, but missed the 32 km savings available via Rimnicu and Pitesti.
| Property | Value | Explanation |
|---|---|---|
Complete |
No |
Greedy can enter infinite loops or dead ends if not using graph search. |
Optimal |
No |
Ignores path cost g(n) — finds the first solution, not the cheapest. |
Time / Space |
O(bm) |
Worst case explores entire space; depends heavily on heuristic quality. |
Greedy search fails at optimality because it ignores how much it cost to reach the current node. It sees only the estimated remaining distance and charges ahead, potentially accumulating a large actual cost to reach a seemingly close node.
When greedy search shines: real-time constraints, very large state spaces where any solution is acceptable, and situations where the heuristic is excellent and near-perfect guidance is available.
A* Search
A* (pronounced "A-star") is the most widely used search algorithm in AI. It combines the path cost tracking of UCS with the heuristic guidance of greedy search.
A* Evaluation Function:
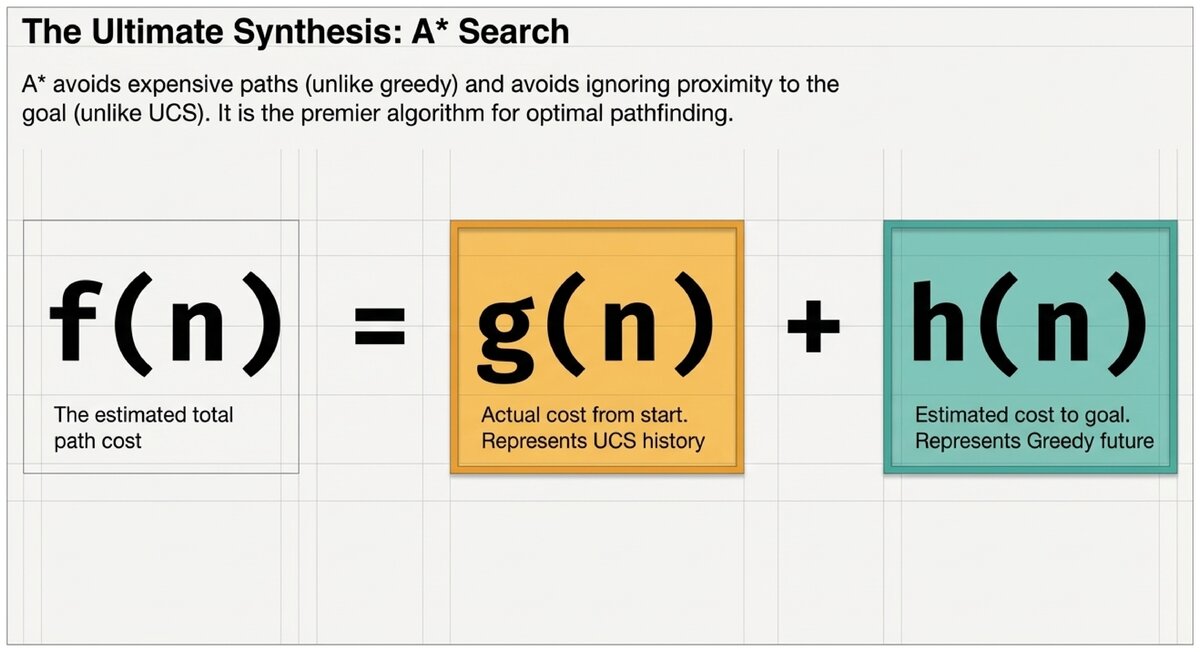
f(n) = g(n) + h(n)
-
g(n) = actual cost of the path from the start node to node n
-
h(n) = estimated cost from n to the nearest goal (heuristic)
-
f(n) = estimated total cost of the cheapest solution path that passes through n
Implementation: Priority queue ordered by f(n) (lowest f first).
By summing actual cost (g) and estimated remaining cost (h), A* avoids two failure modes:
-
It avoids choosing expensive paths (high g), unlike greedy search
-
It avoids ignoring proximity to the goal (high h), unlike UCS
Running A* step by step:
-
Initialize the frontier with the root node (g = 0, f = h(initial state))
-
Remove the node with the lowest f(n) from the priority queue
-
If that node passes the goal test, return the solution
-
Add the node’s state to the explored set
-
For each child node:
-
Compute g(child) = g(parent) + step cost
-
Compute f(child) = g(child) + h(child)
-
If child is not in frontier or explored, add it to the frontier
-
If child is already in frontier with a higher f, update it
-
A* trace: Arad to Bucharest
The same heuristic as before — straight-line distance to Bucharest.
| Step | Node | g(n) | h(n) | f(n) = g+h |
|---|---|---|---|---|
1 |
Arad (start) |
0 |
366 |
366 |
2 |
Sibiu |
140 |
253 |
393 |
3 |
Rimnicu Vilcea |
220 |
193 |
413 |
4 |
Fagaras |
239 |
176 |
415 |
5 |
Pitesti |
317 |
100 |
417 |
6 |
Bucharest (goal) |
418 |
0 |
418 |
A* chose Rimnicu before Fagaras (step 3 vs. 4) because f(Rimnicu) = 413 < f(Fagaras) = 415. It found the optimal 418 km path — the same path that greedy missed.
Why A* Is Optimal
A* is guaranteed to find the optimal solution when h(n) is admissible.
- Admissible Heuristic
-
A heuristic h(n) is admissible if it never overestimates the cost to reach the goal: h(n) ≤ h*(n) for all n, where h*(n) is the true optimal cost from n to the goal. Admissible heuristics are optimistic — they think the goal is at least as close as it really is.
Why admissibility guarantees optimality: A* expands nodes in order of increasing f(n). When it first expands a goal node, the f value equals g — the actual path cost. If h is admissible (never overestimates), no unexpanded node can lead to a cheaper path. Therefore the first goal expanded is always optimal.
Checking admissibility — 8-Puzzle:
Heuristic h₁: count of misplaced tiles. Each misplaced tile requires at least one move. So h₁ ≤ true cost. Admissible.
Heuristic h₂: sum of Manhattan distances. Each tile must travel at least its Manhattan distance. So h₂ ≤ true cost. Admissible.
Heuristic h₃: 2 × Manhattan distance. This doubles the estimate and can exceed the true cost. Not admissible.
| Property | Value | Explanation |
|---|---|---|
Complete |
Yes |
A* will find a solution if one exists (assuming graph search and finite branching). |
Optimal |
Yes |
Guaranteed when h(n) is admissible. |
Time / Space |
Exponential |
A* stores all generated nodes. Memory is its primary practical limitation. |
A*'s main real-world limitation is memory. Like BFS and UCS, it stores every generated node. For very large problems, variants like IDA* (iterative deepening A*) apply the iterative deepening trick from Section 3.3 to keep memory use at O(d).
Three Algorithms Side by Side
| Algorithm | Evaluation Function | Optimal | Best For |
|---|---|---|---|
UCS (uniform-cost) |
f(n) = g(n) |
Yes |
No heuristic available |
Greedy best-first |
f(n) = h(n) |
No |
Quick approximate solutions |
A* |
f(n) = g(n) + h(n) |
Yes (if h admissible) |
Optimal solutions with good heuristic |
Visualize A* interactively at PathFinding.js (MIT License) — select "A*" and watch how f(n) guides expansion toward the goal more directly than BFS or DFS.
For an excellent conceptual walkthrough, see the Red Blob Games A* tutorial at redblobgames.com.
A* with h(n) = 0 (the "zero heuristic") reduces to uniform-cost search. A* with a perfect heuristic — one that equals the true remaining cost — would expand only nodes on the optimal path.
What does this tell you about the relationship between heuristic quality and search efficiency? How does this motivate the work of designing good heuristics (Section 3.5)?
Check your understanding of greedy search and A*.
Based on the UC Berkeley CS 188 Online Textbook by Nikhil Sharma, Josh Hug, Jacky Liang, and Henry Zhu, licensed under CC BY-SA 4.0.
This work is licensed under CC BY-SA 4.0.